Abstract
Introduction
While many amputees show great adaptability to tasks without fully regaining complete hand function, the inability to perform certain fine motor movements creates a functional need for prosthetic finger systems that enable improved hand function. 3D printing leads to inexpensive and scalable solutions to fit pediatric needs [1]. 3D printing also gives options to rapid prototype and come up with multiple iterations of the model. Due to the subject being a preadolescent boy, 3D printing also leaves the option to change the scaling of the prosthetic as he grows.
Methods
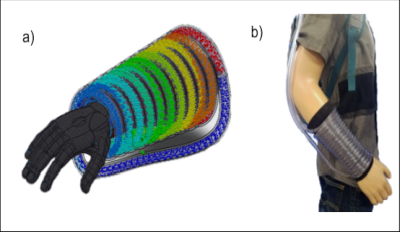
This is a body-powered, cable-driven prosthesis that leverages existing hand/wrist functions to actuate the prosthetic fingers. While grasping, movements include prehensile, prismatic, and circular grasp. To move the subject’s fourth phalanx, a wire is connected to the distal portion of the third phalanx. This wire runs through a designed channel imitating the webbing of his hand to the distal portion of the fourth phalanx. The cable in the system is wound in tension. When the distal phalanx of the third phalanx moves, it moves the distal phalanx of the fourth phalanx in the same motion. This system can be analogous as to how a tape measure is tightly wound [2] and is showcased by Figure 1.

Figure 1:CAD Design of Current Iteration
Additionally, a thumb has been prototyped. Through the use of a ratcheting mechanism, it can be repositioned along a single axis and prevent backwards movement. This is to aid in gripping by creating a wedge-like hold on heavier objects, such as brooms and hockey sticks. The thumb is positioned by the other hand.
Results
The cable-induced system shows promise. More work is required for a functional prototype. As a proof of concept, the joint can be 3D printed in a flexible material and manipulated by cable. Increased efficacy and durability are needed for proper implementation.
While the thumb also has potential, to survive the rigors of a young patient, strengthening is necessary. It would be ideal to add a second ratcheting system for a second axis of movement.
Discussion
Stability and durability prove to be the next areas of focus for the prostheses. This requires more substantial prototypes. 3D printing may be the solution, but bracing is needed to prevent the shearing forces of everyday life.
Acknowledgements
This work was supported by the National Science
Foundation under Grant No. (NSF-CBET 1510367).
References
[1] Zuniga, J et al, BMC Res. Notes 8, 10, 2015.
[2] Ming L et al., Appl. Mech. Mater, 568-570, 899-903, 2014.