Introduction
Force and displacement-based methodologies are generally proposed by modern seismic design codes. In the force-based analyses, the equivalent earthquake loads are reduced by a factor “R”, which relies on the ductility and over-strength factor of the structure. At the end of the design procedure, the structural members are expected to carry those reduced loads safely. However, the deformation intensities and their distribution on the structural system are not clear. The displacement-based methods use the structural capacity curve to compute the displacement demand of the structure. Member deformations are determined and classifed by comparing these against some reference values. However, the effective duration and frequency content of the earthquake (EQ) and the hysteretic behavior of structural members are disregarded in this methodology. It was also stated that displacement-based procedures have difficulty in accounting for the duration-related damage, in a similar manner to force-based methodologies (Chou and Uang, 2000). Hence, a more comprehensive design methodology named as “Energy Based Seismic Design” (EBSD) was proposed, originally by Housner (1956). It takes into account frequency content and duration of the EQ and hysteretic behavior of the structural members rather than envelope curves. Additionally, energy is a scaler value whereas force and displacement are vector terms. Therefore combination effects of orthogonal directions might be minimized. Moreover, seismic energy account for cumulative effects of both force and deformation whereas displacement procedures consider pay attention for only the maximum values.
After introducing by Housner (1956); energy balance equation in time domain, that based on equation of motion of a single degree of freedom system (SDOF), derived by Akiyama (1985). It was also shown in the literature that mass normalized seismic input energy can be expressed in spectral form.
Methods
Determination of the mass normalized seismic energy (EI/m) spectrum necessitates tedious and time consuming calculation efforts. However, some analyses tecniques exists in the literature that enable the analysis of SDOF systems. One of them is the piece-wise exact method proposed by Aydınoğlu and Fahjan (2003). It is capable of acounting for the geometric nonlinearity.The originally proposed method to obtain seismic response of SDOF systems, is utilized here as a tool in the determination of the EI/m spectrum. Even though the original method is able to consider two different constitutive equations, Elastic Perfectly Plastic (EPP) response model has been utilized in the developed algorithm depending on the conclusions that the hysteretic model type is ineffective on the seismic input energy (Benavent-Climent 2010, Dindar et al. 2015).
Restoring force of the system can be rewritten as given in Eq. 1.
| (1) |

Where βej is effective stiffness coefficient of the linear segment in terms of the initial stiffness, ω is circular frequency of the SDOF system, fs is restoring force, m is mass, u.. is relative acceleration, u. is relative velocity, u is relative displacement, and ug is ground acceleration. The ground acceleration can also reexpressed as a linear function between the time steps. Solution of the equation has two parts namely complementary solution corresponding to the free vibration response of system and particular solution that satisfies right hand side of the equation. The solutions were given for possitive, negative and zero effective stiffnesses in Aydınoğlu and Fahjan (2003). Moreover displacement and velocity of the system at the time step of ti+1 was obtained as given in Eqs. 2 and 3. The acceleration response of the system can be computed simply through derivating the velocity.
| (2) |
| (3) |


Since the structural responses are determined, seismic input energy and its components are computed by Eqs. 4 to 7.
| (4) |
| (5) |
| (6) |
| (7) |


Where Ek is kinetic energy, ED is damping energy and Es is strain energy.
Results
The MATLAB based code (PW-SPECTs) is generated for the algorithm developed in the content of this paper. The input data of the code are the vibrational period, damping ratio, time span and ground motion data. The code not only produces the responses and the energy histories but also their spectral counterparts. The tested SDOF and MDOF systems with diverse vibrational and damping properties are used for the verification of PW-SPECTs.
The extended algorithm firstly verified by the experimental results in terms of relative displacement, velocity and acceleration responses of a SDOF system tested on shake table, Fig. 1.
Relative displacement | Relative velocity |
Relative acceleration | |
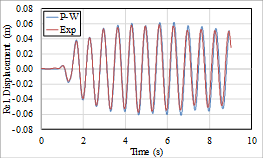

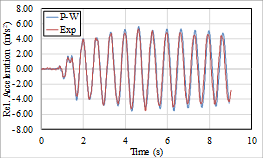
Fig. 1: PW-Spect vs experimental results in terms of relative top responses
Since the algorithm successfully computed the response of a SDOF system having a specific vibrational period; displacement, velocity and acceleration spectra of a spefic record computed by PW-SPECTs and Seismo Signal was compared in Fig. 2. The results were consistent with each other.
Displacement spectra | Velocity Spectra |
Acceleration spectra | |



Fig. 2: Spectra computed by PW-SPECTs and SeismoSignal
In the third phase of the verification, experimentally obtained mass normalized seismic input energy history of a SDOF specimen having 0.667 s vibrational period and 0.3% damping ratio was compared with PW-SPECTs. The results were almost identical.
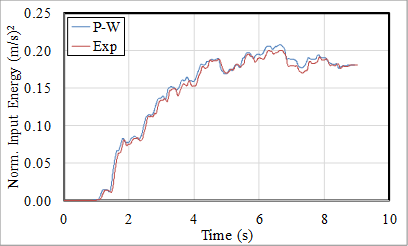
Fig. 3: Mass normalized seismic input energy computed by experimental results and PW-SPECTs
Since there were not commercial software for computing seismic energy spectra, the seismic energy spectra computed by PW-SPECTs were compared with the 10 discrete SDOF specimens with diverse natural vibrational periods. The black dots in the figure corresponds to the seismic energy computed from the experimental results whereas the blue solid line corresponds to prediction of PW-SPECTs.

Fig. 4: Piece-wise exact method vs. experimental results in terms of seismic energy
The numerical spectrum makes relatively good estimations for the experimental results.
Conclusions & Contributions
Close form solution of the energy balance equation depending on piece-wise exact method is proposed here. The developed algorithm is an efficient tool to obtain both seismic input energy history and spectra in a very short time without tedious processes. Therefore it can be utilized as a practical tool for the developed or will be developed seismic energy based procedures.
References:
Akiyama, H. (1985). Earthquake-Resistant Limit-State Design for Buildings. University of Tokyo Press.
Aydınoğlu, N., Fahjan, Y.M. (2003). A unified formulation of the piecewise exact method for inelastic seismic demand analysis including the P-delta effect. Earthquake Engng Struct. Dyn., 32:871-890.
Benavent-Climent, A., Zahran, R. (2010) An energy based procedure for the assessment of seismic capacity of existing frames: application to RC wide beam systems in Spain. Soil Dynamics and Earthquake Engineering, 30:354-367
Chou, C.C., Uang, C.M. (2000). Establishing absorbed energy spectra – an attenuation approach. Earthquake Engineering and Structural Dynamics, 29(10):1441-1455.
Dindar, A.A., Yalçın, C., Yüksel, E., Özkaynak, H., Büyüköztürk, O. (2015). Development of earthquake energy demand spectra. Earthquake Spectra, 31(3):1667-1689.
Housner, G.W. (1956). Limit design of the structures to resist earthquakes. Proceedings of the 1st World Conference on Earthquake Engineering. Berkeley: California.
SeismoSoft (2016) SeismoSignal
Abstract Summary
Seismic energy balance concept firstly introduced by Housner (1952) and then Akiyama (1985) obtained energy balance equation in time domain that based on the equation of motion of a single degree of freedom system (SDOF).
Energy based seismic design considers both force and deformation while accounting for the influence of cumulative damage. In contrary, displacement based design methods pay attention for only the maximum values.
Determination of the EI/m spectrum necessitates vast and time consuming calculation efforts. However, some analyses tecniques exists in the literature that enable the analysis of SDOF systems such as piece-wise exact method. It is capable of acounting for the geometric nonlinearity.The method that was originally proposed to obtain seismic response of SDOF systems, is utilized here as a tool in the determination of the EI/m spectrum. The original method is able to consider two different constitutive equations. In the algorithm developed in this paper, the Elastic Perfectly Plastic (EPP) response model has been utilized, depending on the conclusions that the hysteretic model type is ineffective on the seismic input energy.
The MATLAB based code PW-SPECTs is generated for the algorithm developed in the content of this paper. The input data of the code are the vibrational period, damping ratio, time span and ground motion data. The code not only produces the responses and the energy histories but also their spectral counterparts. The tested SDOF and MDOF systems with diverse vibrational and damping properties are used for the verification of PW-SPECTs.
Close form solution of the energy balance equation depending on piece-wise exact method is proposed here. The developed algorithm is an efficient tool to obtain both seismic input energy history and spectra in a very short time without tedious processes.